the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 19 Oct 2023
| 19 Oct 2023
A Mediterranean drifter dataset
Antonio Bussani
Milena Menna
Andrea Satta
Roberto Sorgente
Andrea Cucco
Riccardo Gerin
Over a hundred experiments were conducted between 1998 and 2022 in the Mediterranean Sea using surface Lagrangian drifters at coastal and offshore levels. Raw data were initially unified and pre-processed manually by eliminating spikes and wrong positions or date/time information. The integrity of the received data packages was checked, and incomplete ones were discarded. Deployment information was retrieved for each drifter and integrated into the PostgreSQL database, realized and maintained by the National Institute of Oceanography and Applied Geophysics (OGS) in Trieste (Italy). This database also collects a variety of metadata about the drifter model, project, owner, and operator. Subsequently, data were processed using standard procedures of editing and quality control developed for the OGS drifter dataset to remove spikes generated by malfunctioning of the sensors and to obtain files with common characteristics. Drifter data and plots of each track were also visually checked to remove any point not identified by the automatic procedure and which were clearly erroneous. Drifter trajectories were split into two or more segments that are considered different deployments in the case of specific drifter behaviour. Data were interpolated at defined time intervals providing a dataset of 158 trajectories, available from the public open-access repository of SEA scieNtific Open data Edition (SEANOE) at https://doi.org/10.17882/90537 (Ribotti et al., 2022), in two versions (one compliant with the Copernicus format and the other one usable with Panoply netCDF viewer), and of SeaDataNet at https://cdi.seadatanet.org/search/welcome.php?query=2610&query_code={9F00DF80-1881-42DD-9DF1-B9BD0282F2B0} (last access: 5 October 2023).
- Article
(3707 KB) - Full-text XML
- BibTeX
- EndNote





In oceanographic research since the early 1980s, extensive use has been made of surface drifters to study ocean surface dynamics, particularly during the U.S. Coastal Ocean Dynamics Experiment (CODE) described by Davis (1985), with the design, testing and use of lightweight, inexpensive drifters. They were tracked by radio direction finding triangulation and also the then-new satellite Global Positioning System (GPS), launched in 1978. These drifters, named CODE, are still used today, and have been greatly improved in their data transmission systems.
In general, drifters are designed to follow the sea currents for long distances while minimizing the direct effects of wind and waves acting on the elements protruding outside the sea surface.
In 1991 the Global Ocean Observing System (GOOS) programme started, led by the Intergovernmental Oceanographic Commission (IOC) of UNESCO, followed in 1994 by its European component, EuroGOOS, which highlighted its operational oceanography value to society (Woods et al., 1996). The activities related to operational oceanography promoted the use of drifters also for the management of emergencies at sea, like oil spills or contaminants (Pisano et al., 2016), mitigation of extreme events (Goni et al., 2017; Menna et al., 2023), and the validation of numerical forecasting systems (De Dominicis et al., 2016; Sorgente et al., 2016).
The Italian National Research Council in Oristano (CNR hereafter) uses drifters for research purposes linked with scientific projects, mainly focused on the study of local or sub-basin surface dynamics or on the calibration and validation of oceanographic prediction systems, in the framework of physical and operational oceanography.
CNR started its activities with drifters in 1998–1999. Early activities consisted of the usage of a single drifter in 15 coastal experiments for 6 months, along with the use of a multiparametric probe, to study the hydrodynamics of the Gulf of Oristano (Table 1), off western Sardinia. The adopted instrument was a Coastal Lagrangian Drifter (CLD) designed and produced by a small Italian enterprise and was capable of GPS and digital network (GSM) data transmission (Ribotti et al., 2000, 2002). Due to technical problems, experiments were interrupted but restarted 10 years later with different objectives and the adoption of a different type of drifter. In 2009 and 2010, CNR implemented a numerical oceanographic and oil spill prediction system limited to the Bonifacio Strait area in collaboration with the local coast guard. For the calibration and validation of the implemented numerical models, nine experiments (Table 1) were conducted inside and outside the Bonifacio Strait by using US CODE drifters with satellite transmission (Cucco et al., 2012; Ribotti et al., 2013). As some experiments were carried out in La Maddalena Archipelago, a coastal area characterized by narrow channels and small islands, due to the high risk of stranding, CNR modified the instruments by inserting a switch to turn them on and off, useful for re-using recovered drifters.
In the framework of operational oceanography, in September 2014, CNR participated in an international exercise at sea on oil spill combat and search and rescue (SAR) activities launching three new Spanish satellite drifters, named Iridium Ocean Drifter (ODi; Table 1), with a solar panel and temperature sensor, specifically designed for oil spill studies. After the exercise, drifters were released in western and southern Sardinian coastal waters to investigate the main surface hydrodynamics.
From the end of 2015 onwards, new cost-effective, handy, and durable GPS drifters produced by a Spanish company were adopted by CNR for several field activities. Different types of instruments were used, feasible for coastal (with GPRS, General Packet Radio Service, transmission) or for offshore areas (with satellite transmission), with a switch and rechargeable batteries that permitted the use of the same drifter in different experiments. GPRS was the first cellular system specifically designed for packet-switched, medium-speed data transfer over a cellular network, so it can only be used in coastal areas covered by a cellular network and it is less expensive than GPS. These drifters were deployed in experiments all over the central Mediterranean Sea (Table 1) with data acquisitions ranging from few hours to over 12 months for purposes linked to both physical/biological (Quattrocchi et al., 2021a, b) and operational oceanography activities (Ribotti et al., 2019; Sorgente et al., 2020).
Recently, the OGS in Trieste re-processed all drifter experiments following standard state-of-the-art procedures (editing and interpolation) already adopted for previously released Lagrangian datasets. We then created a new dataset freely available online in two formats: Copernicus and NASA/NOAA-like (manageable by Panoply, a NASA-developed data viewer).
In this paper we describe the drifter characteristics and the procedures of data acquisition and processing in detail.
The CNR conducted 138 experiments in the Mediterranean Basin with surface Lagrangian drifters over 12 years, not continuously, between July 1998 and April 2022 (month of the last recovery) at the coastal and offshore levels (Table 1 and Fig. 1).
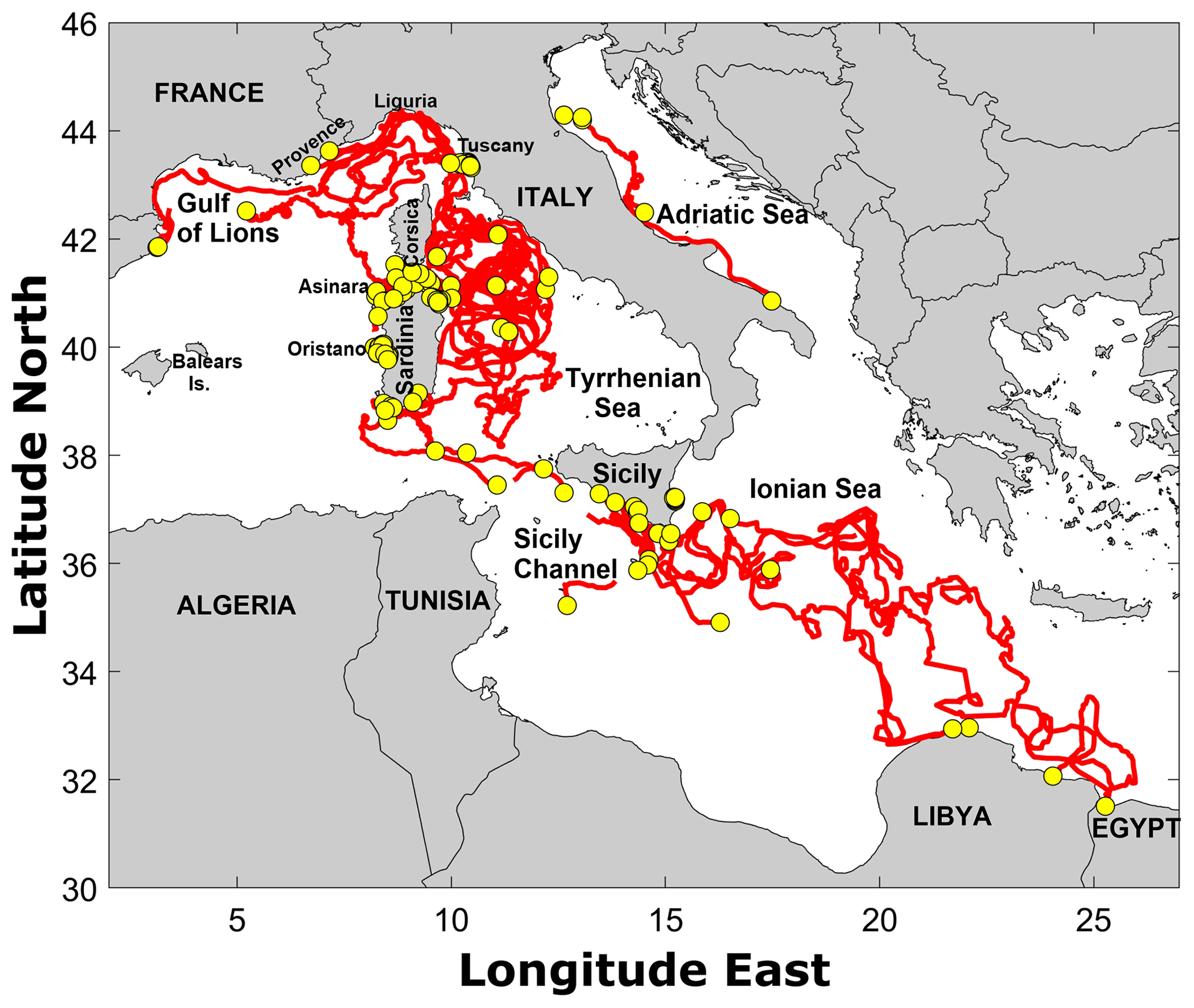
Figure 1In red, all drifter trajectories acquired during the experiments between 1998 and 2022 (yellow dots represent the position of the deployment).
Table 1List of the 138 experiments undertaken between 1998 and early 2022. Acronyms indicate drifters per type: CLD; CODE; ODi; and the SouthTEK Nomad family LCA (GPRS), LCE (offshore), LCH (hybrid), and LCF (with temperature sensor). Dates (year and month) and start areas refer to when and where the drifters were initially deployed.
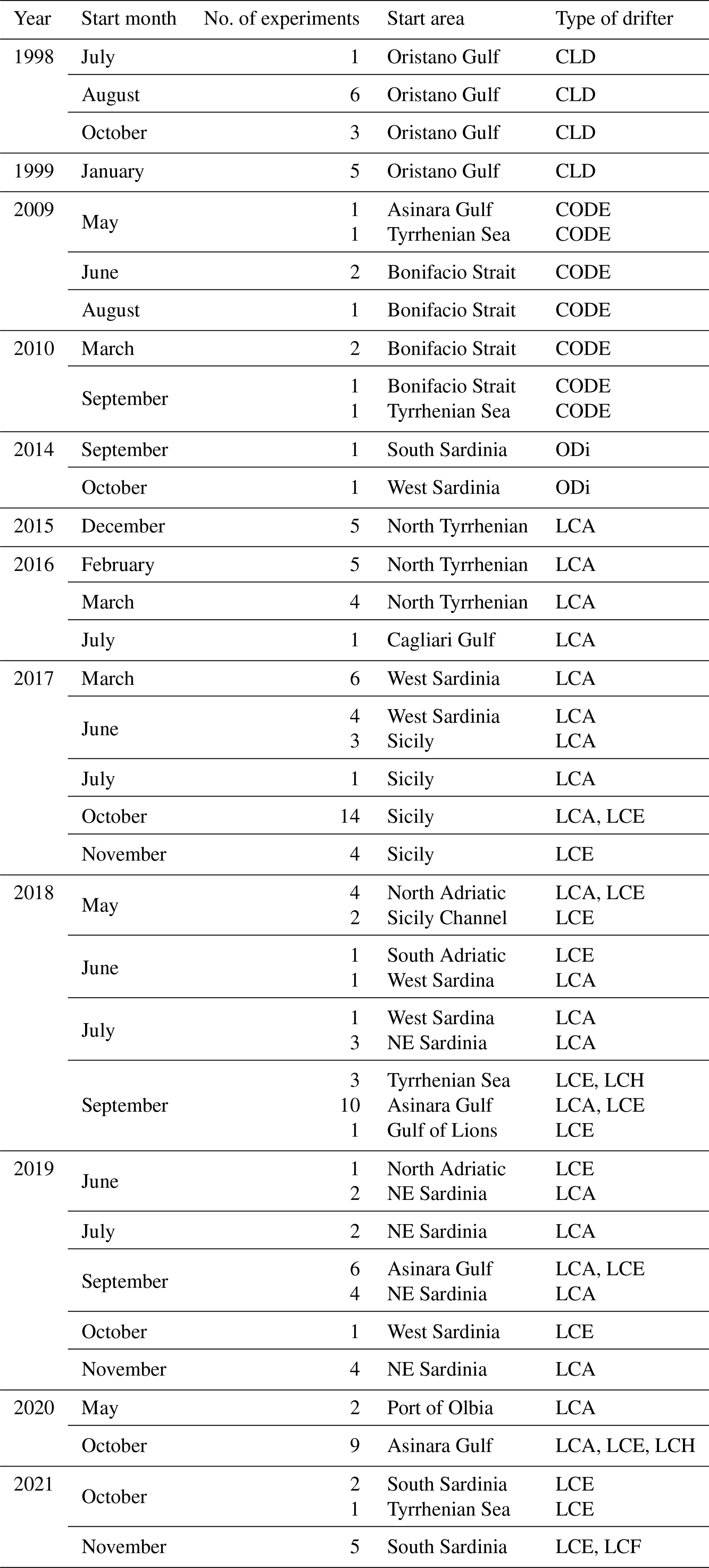
Lagrangian drifters produced by four different companies have been used in these years, with different characteristics in data transmission, structure, repeatability of the experiments, dimensions, batteries, and management of the experiments.
2.1 Tracks 1998–1999: Coastal Lagrangian Drifter or CLD
The CLD was produced by the company InnoTech S.c.r.l. (Italy) and designed just for coastal use. It transmitted its GPS position using a Trimble Lassen™ SK8 at a frequency of 5 min with a GSM mobile phone. The maximum operating time of the buoy was approximately 72 h. The housing of the drifting buoy was made of PVC, with an electronic unit, a rechargeable battery pack, and antennas. The unit is 140 cm in height and 27 cm in diameter and weighs 12.5 kg (Fig. 2a). A sail (0.5 m length and diameter) was attached below the drifter to enhance the drag below the water surface. The acquired position data were transmitted through a commercial modem to dedicated software on a computer. This software, in a Windows™ environment, allowed the automatic reception of data from the buoy and provided for the control of the correct functioning of the system and for a quick and easy setting of the operating parameters (selection of the buoys used, interval of acquisition of the data, etc.). Transmitted data were collected into files in several formats including the ASCII format with the extension DAT. This drifter was used for about 6 months, between July 1998 and January 1999 (Table 1) for experiments of a few hours to study the surface circulation of the Gulf of Oristano (off western Sardinia).
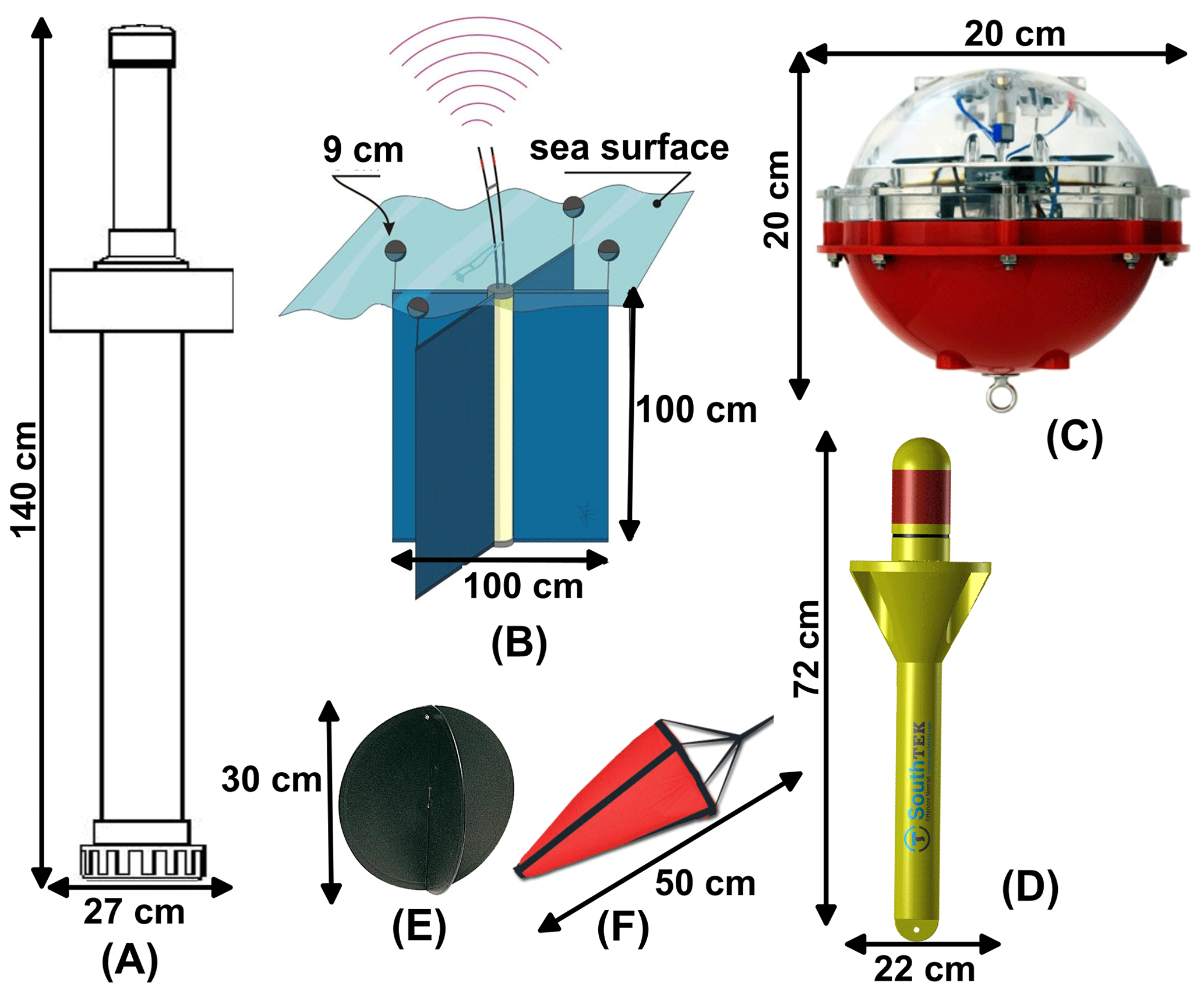
Figure 2The four types of drifters and drogues used, with their dimensions in centimetres: (a) CLD, (b) CODE, (c) ODi, (d) LC, (e) Pila drogue, and (f) Satis drogue (credits: ODi (c) from the Albatros leaflet, LC (d), and drogues (e; f) from the SouthTek website).
2.2 Tracks 2009–2010: CODE drifters
Between May 2009 and September 2010 (Table 1), CNR used the ArgoDrifter or CODE by Technocean (FL, USA) for studies in northern Sardinia. The instrument was 100 cm in height by 100 cm in diameter (Fig. 2b) and consisted of a cylinder containing batteries and electronics and four arms placed at 90∘ each other, supporting four sails, for a total area of about 2 m2. Batteries permitted operation of 1 year with an hourly data acquisition frequency. CODE drifters were fitted with an ARGOS satellite transmitter, a GPS, and a temperature sensor. Drifter position was measured by satellite, both ARGOS and GPS. Operatively GPS and ARGOS differ substantially in their accuracy of the positioning measurements. GPS accuracy has an average error of 4 m, with an ellipse of variance of axes of about 5–7 m (Barbanti et al., 2005); the position measured by ARGOS varies, being linked with the number of visible satellites used daily: from a minimum of 1, with an error of about 1.5 km, to 4 or more, with an error of less than 50 m. Direct slip measurements (Poulain et al., 2002; Poulain and Gerin, 2019), with acoustic current metres, show that CODE drifters follow surface currents with a downwind slip of 0.1 % of the wind speed and a movement consistent with the Ekman dynamics near the surface and a velocity component to the right of the prevailing wind. The wind-induced slips and the Ekman surface currents can also be estimated from drifter data using simple regression models which include complex drifter velocities and surface wind products (Ralph and Niiler, 1999; Rio and Hernandez, 2003; Centurioni et al., 2009; Poulain et al., 2009, 2012, 2013). These models show that the CODE wind-driven currents (slip + Ekman + Stokes) in the Mediterranean are about 1 % of the wind speed at an angle of about 30∘ to the right of the wind.
Drifters were set to measure their position every 4 min during each experiment. In 2010, CNR modified the CODE drifters by inserting an external on/off switch not present in the original instrument. This made it possible to carry out different experiments with the same instrument even after months. Data were downloaded from the ArgosWeb site, managed by the French Collecte Localization Satellites (CLS), in ASCII and/or in binary format. Subsequently they were subjected to post-processing, using MATLAB codes provided by the OGS in Trieste. The median of the data was calculated for each interval then eliminating data outside the range established by the mean ± 3 standard deviations.
This type of drifter was mainly used in northern Sardinia (Asinara Gulf and Bonifacio Strait), with some trajectories acquired also in the northern Tyrrhenian Sea. Experiments ranged from a few hours to over 1 month with the aim of studying the circulation in the Bonifacio Strait and La Maddalena Archipelago and validating a forecasting system for oil spill combat (Cucco et al., 2012; Ribotti et al., 2013) in the framework of the Italian SOS Bonifacio project (Ribotti et al., 2013).
2.3 Tracks 2014: Iridium Ocean Drifter (ODi)
In September–October 2014 (Table 1), CNR used the Iridium Ocean Drifter (ODi), made by Albatros Marine Technology SA (Spain). It is a small, low-cost, and compact surface buoy that tracks sea currents with a GPS module and transmits data via the Iridium satellite system (Short Burst Data – SBD), a global full ocean coverage bidirectional satellite communication network. It was composed of two identical halves of a spherical drifter of 20 cm in diameter (Fig. 2c) and about half of it protruded above the sea surface. The ratio of the drag area in the water to drag area outside the water was 16.9 (Callies et al., 2017). This makes it optimal for oil spill tracking and search and rescue operations. Its 5 L volume and 3 kg weight allowed the use of a holey-sock drogue, while the presence of a solar power charging module, used to reduce battery size, gave a theoretically unlimited autonomy. Standard measurements were GPS position and time, temperature, and battery level. The sampling frequency and transmission frequency were user-configurable through its software and internet connection. A sail, similar to that described for CLD drifter, was attached below every drifter. Data were acquired with a frequency of 20–30 min. Despite the interesting structure suitable for studies on oil spills at sea, the drifter showed some technical problems that limited its use in long-term experiments. A first launch was scheduled in September 2014 in the Gulf of Cagliari, south Sardinia, with an acquisition time of over 1 month in the framework of an international exercise at sea, named Squalo2014, coordinated by the local coast guard. Data were used to validate a high-resolution ocean oil spill forecasting model (Sorgente et al., 2015). Another short deployment, of less than 6 h, was made in the Oristano Gulf, a few nautical miles off western Sardinia.
2.4 Tracks 2015–2022: coastal and offshore Nomad drifters
Since December 2015 (Table 1), CNR has used Lagrangian drifters of the Nomad family produced by SouthTEK Sensing Technologies S.L. (Spain) and used by the scientific community (Bolado-Penagos et al., 2020; Sala et al., 2022). The buoys are of three types: coastal GPRS, offshore satellite, and hybrid, which can use either GPRS under mobile coverage or satellite transmission. Both GPRS drifters, namely Coastal Nomad, and the satellite ones, Offshore Nomad, are made of plastic, yellow coloured, 72 cm in height by 22 cm in diameter (Fig. 2d), and have a weight of 2.895 kg. The Hybrid Nomad drifters are the same. The lithium batteries allow for GPRS operation of up to 7 d and satellite drifter operation of up to several months. When in the water, only the yellow cylindrical head of about 16 cm is above the sea surface. Drifters transmit data in real time to a web portal called LD Manager where positions can be visualized in real time and data downloaded in different formats. Each drifter was identified by a letter, after the prefix LC, for type of transmission or sensor installed. So, A stands for a coastal GPRS drifter (LCA), while E for offshore satellite ones (LCE), F for offshore drifters with the temperature sensor (LCF), and H for hybrid drifters (LCH). The latter transmits both by GPRS, when in the GSM-covered areas, and by satellite, when offshore. Furthermore, as most platforms are not equipped with additional sensors, for the purposes of data uniformity we have not considered temperature data acquired with LCF drifters but only position data. Below the water, two different drogues, namely Pila and Satis, could be anchored through a swivel shackle. The Pila was composed of two black joined plastic circles of 30 cm in diameter and used to follow the first layer of water, while the Satis was an orange PVC sea drogue, floating anchor 50 cm long, similar to the drogues used for CLD and ODi drifters, linked to the shackle through 3 mm polyester rope and positioned immediately below the drifter. Just in three experiments in the northern Adriatic Sea, for specific project reasons, in 2018 the Satis drogue was positioned at 14 m depth on drifters LCE00236 and at 20 m on LCE00234 and in 2019 at 14 m depth on drifter LCE00354. Data acquisition frequency varied from 5 min to 12 h between experiments but also during a single track because of several situations or objectives like drifter deployment or recovery, distance from the coast, and aim of the experiment. Usually for Coastal Nomad drifters (LCA) we used frequencies of acquisition between 5 and 30 min while for Offshore Nomad drifters between 15 min and 12 h. Thanks to its ease of use, in drifter management or in data visualization and downloading, their use is still ongoing. Over the years they have been used for environmental and oceanographic studies both at coastal and offshore scale but also for the validation of ocean forecasting and oil spill systems in the open ocean (SOS Piattaforme project, http://www.seaforecast.cnr.it/sos-piattaforme, last access: 5 October 2023) and coastal areas (Sicomar plus project; http://www.seaforecast.cnr.it/sicomarplus, last access: 5 October 2023) or ports (Geremia project, http://seaforecast.cnr.it/geremia, last access: 5 October 2023). Experiments have durations from a few hours to over 12 months with data covering most of the dataset presented here.
The drifter trajectories were submitted to a pre-processing immediately after the end of the experiment. Ancillary data like temperature, battery level, or drogue presence were not considered as these were not available for all platforms. From each file, repeated positions or wrong date/time, generated by the failure of the GPS receiver, were manually deleted. Data from the CLD drifter before the year 2000 displayed a large number of spikes as GPS was mainly for military use in that period and a systematic position error (of 100 m) was intentionally added to the data. Over the years, the accuracy of the positioning system has improved thanks to the increased availability of satellites and improved GPS receivers.
After the pre-processing, the drifter data of all the experiments were gathered in a unique Excel file and sent to OGS to be ingested and elaborated by the procedure, schematically shown in Fig. 3.
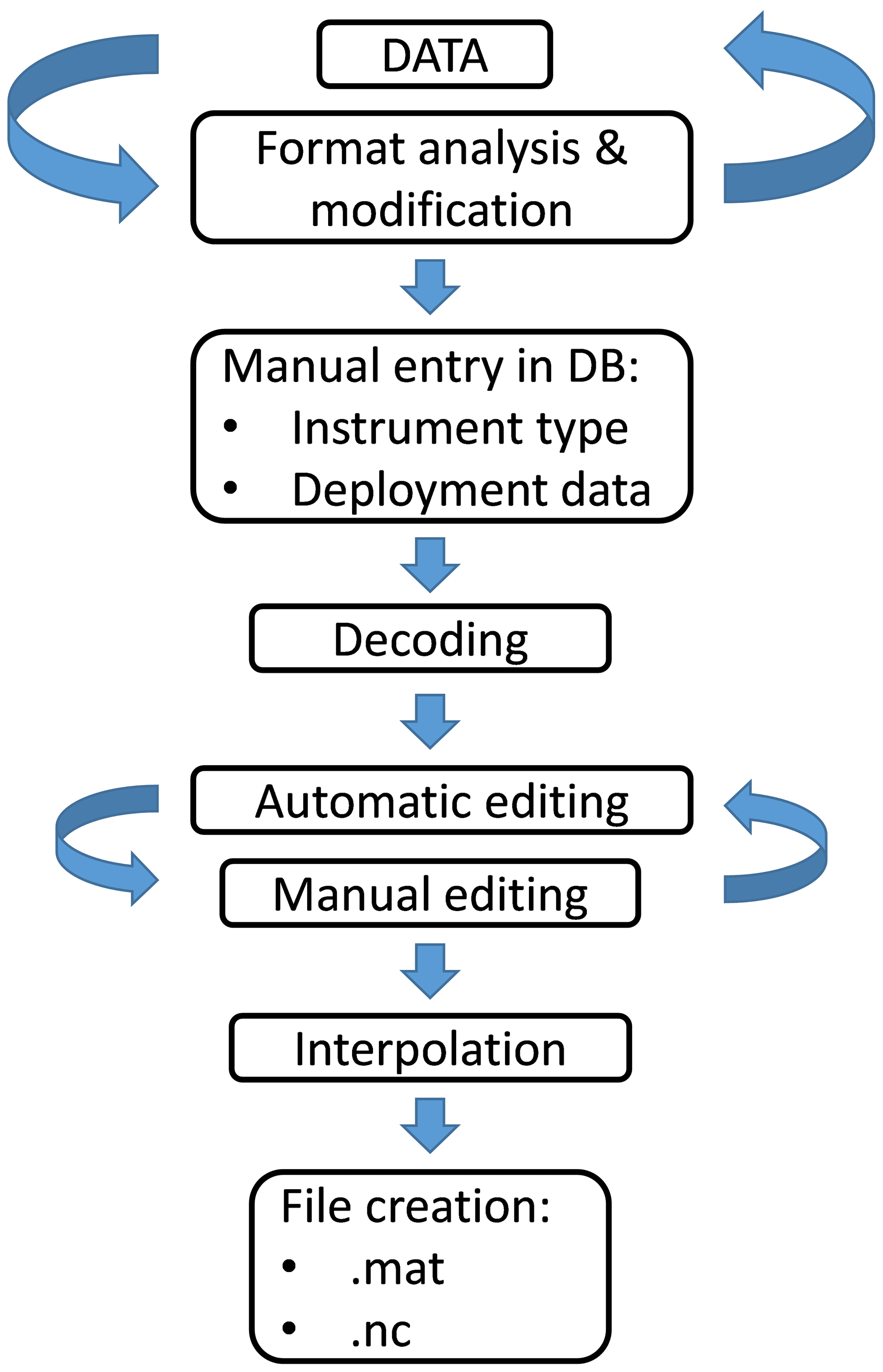
Figure 3The processing procedure implemented at OGS from data acquisition (top) to file creation in MATLAB/NetCDF formats.
The OGS processing procedure is the result of more than 15 years of experience improving scripts and tests. It is capable of handling over 80 different types of drifters and providing a common and therefore easily comparable set of files and metadata (Gerin and Bussani, 2011; Menna et al., 2017). As a first step, the original Excel file collecting all the tracks was split into several text files corresponding to the data provided by the different drifters. These files may include data from different experiments. Deployment and recovery information was retrieved from the original dataset and from the experiment notes and filled into a database management system based on the PostgreSQL free software (https://www.postgresql.org/, last access: 5 October 2023) at OGS. The database was then enriched with other important metadata such as the type and characteristics of the instruments, the owner, and the principal investigator.
Ad hoc decoding scripts were then implemented to associate the values contained in the files to the corresponding parameters (i.e. time, longitude, and latitude) and extract the data of a single experiment, discarding repeated sets of data. Exceeding spaces and spurious characters were removed to obtain data files compliant with the ASCII standard.
Decoded drifter data were then edited with an automatic procedure, through several QC tests, that replaced flagged time and location data with NaNs. In particular, impossible drifter positions (longitude >180 or <−180 and latitude >90 or <−90) and positions on land were discarded. In the latter case, about 4000 polygons, extracted from the GEBCO 1 min resolution bathymetry data, which define the coordinates of all the coasts of the Mediterranean Sea, were used to determine drifters not in the water. For experiments extremely near the coastline, this last QC test was not carried out to avoid the discarding of useful data. GPS data acquired before the beginning of the experiment and duplicated data due to transmission repetitions were also flagged. In general, randomly, the GPS drifter data may display duplicated positions acquired at different times. This was probably related to the buffer of the GPS module that does not correctly update the position in its memory before transmitting the data. The automatic procedure considers this issue and marks these data as incorrect. This procedure also evaluates the speed of the drifter. The first point (deployment position) was considered good and used as reference for the evaluation of the next point by computing the speed. If this speed exceeded 300 cm s−1, the point was discarded and the evaluation was carried out on the further point; otherwise, it was considered as a new reference and the procedure was iterated along all the available points. Additionally, a fourth-degree polynomial fit was computed on a running window of 20 speed points. Then, speeds deviating from the fit by more than twice the total mean speed and twice the partial speed (computed considering only the points in the window) were not considered.
After the automatic editing procedure, some erroneous data still remained that required a visual check with manual removal. In the case of important temporal gaps or modification of the acquisition frequency during a Lagrangian experiment, the drifter trajectory was split into two segments and considered as two different deployments. New recovery/deployment information was included in the database and the automatic procedure relaunched. In the case of stranding, the automatic editing procedure discarded the data on land but is unable to recognize the moment when the drifter went ashore. The exact stranding time is defined by the operator through the visual analysis of the plotted drifter trajectories.
Edited data were then interpolated at uniform intervals using a kriging optimum interpolation technique based on the correlation of the data (Hansen and Poulain, 1996). The technique adopts a structure function and weights that were previously estimated using the drifter data collected during other experiments in the Mediterranean Sea between 1986 and 2016, included in a dedicated dataset of over 2000 files (Menna et al., 2018a).
Drifter data with acquisition intervals between a few minutes and 2 h were interpolated at 1 h intervals, intervals of 2 to 6 h were interpolated at 3 h intervals, and intervals longer than 6 h at 6 h intervals. The velocities were then calculated as central finite differences of the interpolated positions. The velocity of the first and last point was set as 9999.
At the end of the whole procedure, the final dataset consists of 158 interpolated drifter trajectories (Fig. 4) with at least two data points.
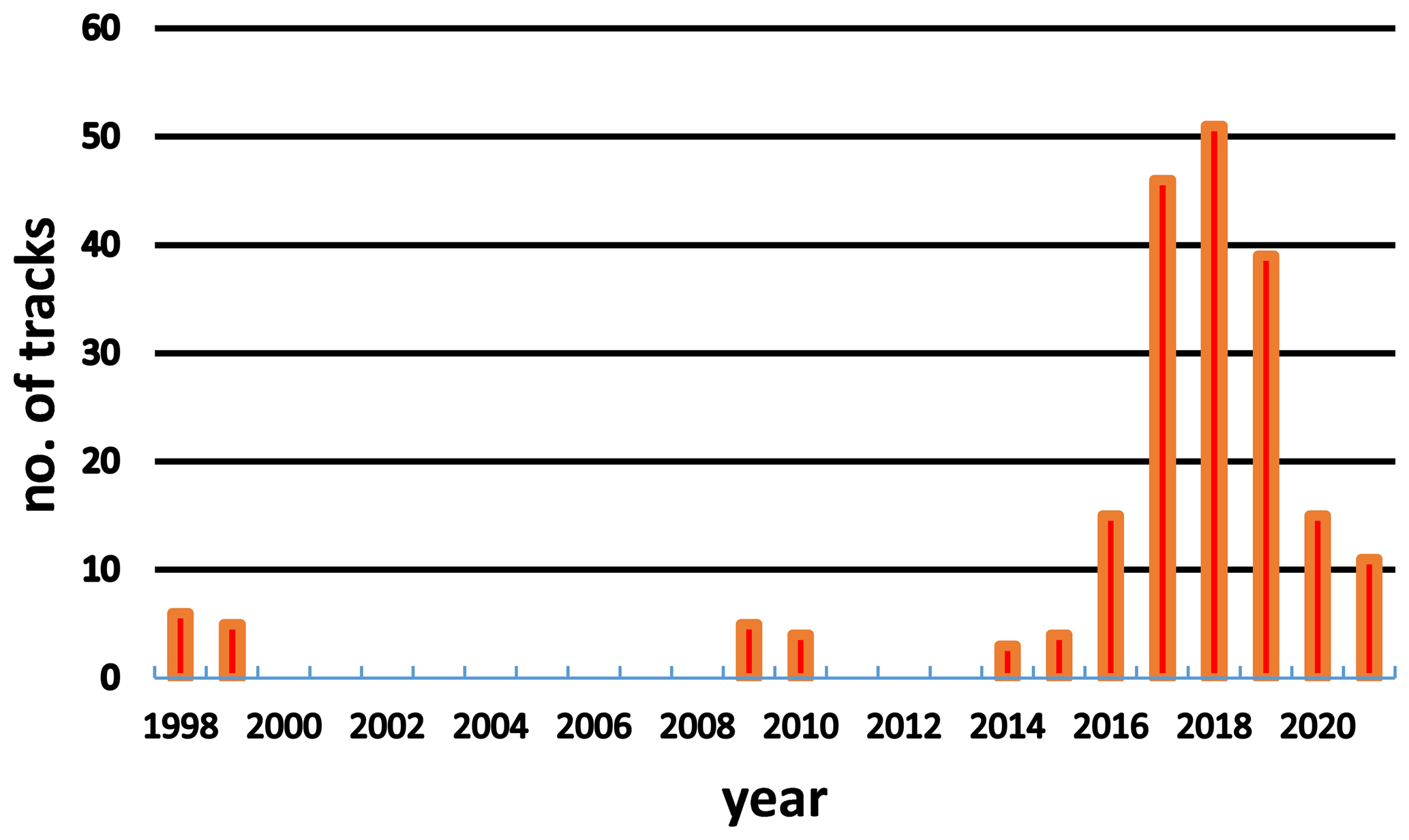
Figure 4The histogram shows the number and distribution per year of drifter trajectories between 1998 and 2021.
These tracks mainly cover the areas around Sardinia, the northern Tyrrhenian Sea (with the highest concentration of data for the whole period), and the Ligurian–Provençal Basin. A few drifters explored the Adriatic Sea, the Ionian Sea, and the Gulf of Lions (Fig. 5).
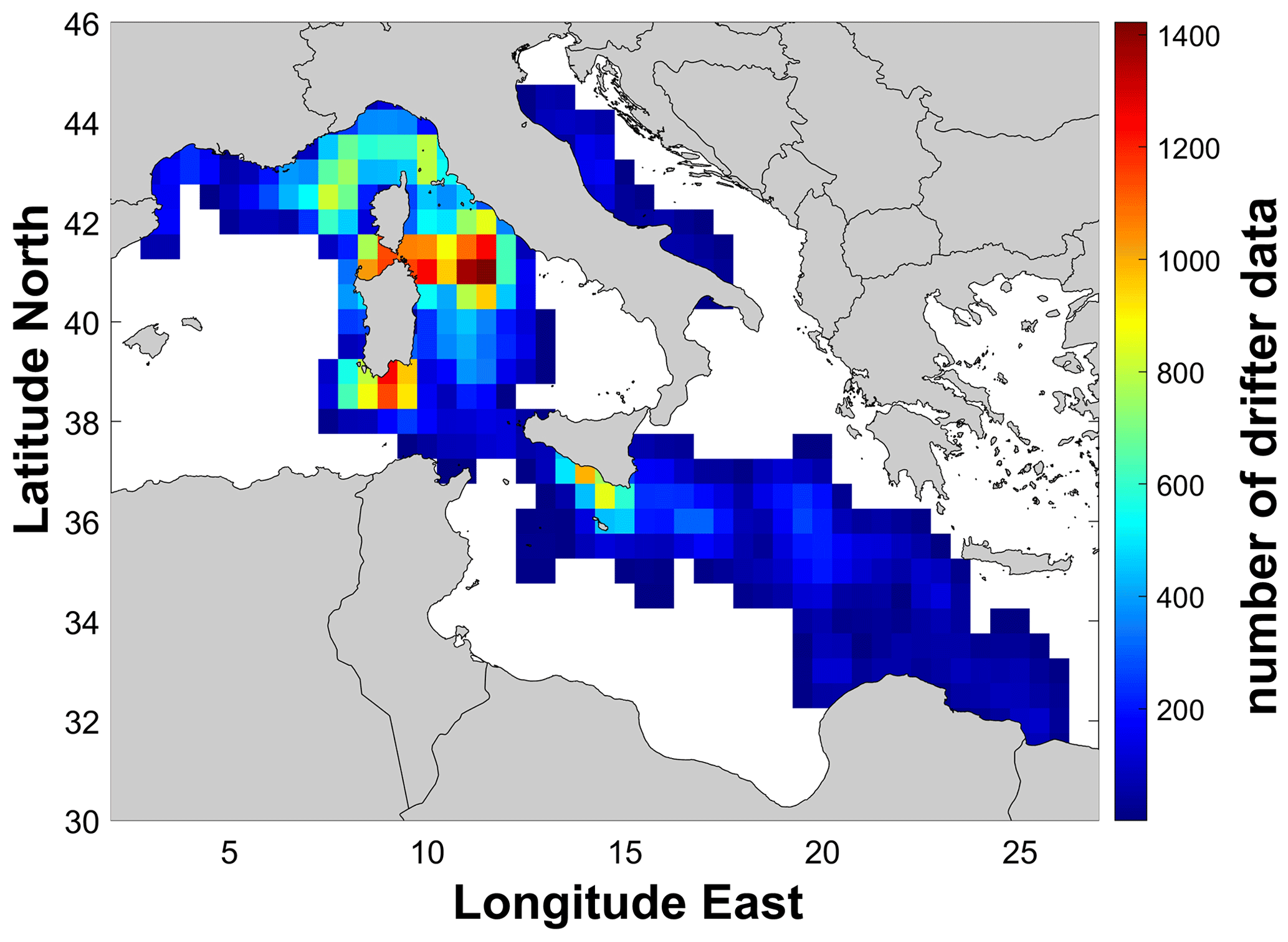
Figure 5The distribution of drifter data per pixel of 0.5∘ for the whole period: 1998–2022. White pixels mean no data.
Figure 5 highlights the main areas of interest of several research projects that undertook surface current experiments, including the Bonifacio Strait, the northern Tyrrhenian Sea, and the Sicily Strait often used for the validation of ocean numerical systems (Cucco et al., 2012; Ribotti et al., 2013).
The dataset described is publicly available and free from the data repository in the SEANOE (SEA scieNtific Open data Edition) service at https://doi.org/10.17882/90537 (Ribotti et al., 2022) and at the SeaDataNet infrastructure at https://cdi.seadatanet.org/search/welcome.php?query=2610&query_code={9F00DF80-1881-42DD-9DF1-B9BD0282F2B0} (last access: 5 October 2023). The presented dataset is composed of interpolated data in NetCDF files which include time, latitude, longitude, zonal and meridional speed, and metadata. The dataset has been realized following international standards used for Lagrangian data and understood to be easily comparable with similar datasets. Definitions and dimensions follow two different formats: (1) the Copernicus Marine In Situ NetCDF format manual (https://doi.org/10.13155/59938, Copernicus Marine In Situ Tac Data Management Team, 2023) specifying the NetCDF file format of Copernicus Marine In Situ TAC used to distribute ocean In Situ data and metadata; (2) the NASA/NOAA-like NetCDF format manageable by Panoply, a data viewer developed by the NASA Goddard Institute for Space Studies (https://www.giss.nasa.gov/tools/panoply/, NASA, 2023). The dataset includes drifter data with subsurface drogue (in the first metres) apart from a few experiments when the drogue was at 14 or 20 m depth (see Sect. 2.4 of this paper). These experiments correspond to the files arib_ LCE234 and brib_ LCE234 (20 m) and arib_ LCE236 and arib_ LCE354 (14 m) of the dataset.
Between mid-1998 and 2022, CNR collected drifter data from more than 100 experiments carried out in the Mediterranean in the framework of scientific and operational projects or international exercises at sea for preparedness and response activities to oil spills or SAR emergencies. Regardless the funding project objective, experiments at sea were planned to use data for different activities, scientific interests, and/or needs like the validation of ocean circulation or oil spill models. So, as with any scientific measurement, there is always a duality between “fit for purpose”, i.e. the projects that funded drifters and experiments, and “fit for use”, i.e. the possibility of reusing the data for different objectives. This duality was facilitated by rechargeable drifters (most of those in the dataset) that, after recovering, could be used in further experiments and new data acquisition.
Then, after the pre-processing of the data by the CNR in Oristano, followed by accurate elaboration by the OGS, all data in the dataset are comparable with one another, even if realized with different drifters and in different years. Further, this dataset is also compliant and can be interfaced with the other drifter datasets produced by OGS in the Mediterranean and Black Sea, which collect about 1700 drifter data starting from 1986 (Menna et al., 2017; Menna et al., 2018a; Menna et al., 2018b; Menna et al., 2019; Gerin et al., 2020), thus facilitating the use of a huge amount of drifter data available for scientific purposes in the Mediterranean Basin (circulation, climate, etc.).
Lastly, the dataset presented here collects 158 interpolated drifter tracks. Further data will be part of an additional dataset and comparable as it is processed according to the same criteria described in this paper.
AR led some projects using drifters, all experiments, and the writing of the paper. AB finalized editing procedures described in the paper and collaborated in writing the paper. RG verified all data, realized the dataset, and collaborated in writing the paper. MM verified all processed data and collaborated in writing the paper. AS prepared all experiments and collaborated in writing the paper. RS and AC led some projects using drifters and collaborated in writing the paper.
The contact author has declared that none of the authors has any competing interests.
Publisher’s note: Copernicus Publications remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
We thank Mireno Borghini from CNR-ISMAR in La Spezia (Italy), the Italian Coast Guard, the Italian Navy, and the captains and crew of all vessels large and small used to launch/recover drifters for their important support.
The data used in this work have been collected in the framework of several national and European projects, i.e the Italian MATTM project SOS-BONIFACIO (prot. DPN-2009-0001027 of 20/01/2009), the Italian MIUR project PON TESSA (agreement PON01_02823), the Italian MIUR flagship project RITMARE (under NRP 2011–2013, approved by the CIPE Resolution 2/2011 of 23 March 2011), the Italian MATTM project SOS-Piattaforme & Impatti offshore (Reg. Uff. U. 0000939.17-01-2017), and 2014–2020 INTERREG V-A Italy – France (Maritime) project SICOMAR plus (IAS CNR Prot. 0001156/2018 of 12/12/2018).
This paper was edited by Alessio Rovere and reviewed by two anonymous referees.
Barbanti, R., Iungwirth, R., and Poulain, P.-M.: Stima dell'accuratezza del drifter tipo CODE con GPS nella determinazione della posizione geografica, Rel. 32/2005 – OGA/20, 16 pp, https://argo.ogs.it/pub/barbanti_etal05.pdf (last access: 5 October 2023), 2005.
Bolado-Penagos, M., González, C. J., Chioua, J., Sala, I., Gomiz-Pascual, J. J., Vázquez, A., and Bruno, M.: Submesoscale processes in the coastal margins of the Strait of Gibraltar. The Trafalgar – Alboran connection, Prog. Oceanog., 118, 102219, https://doi.org/10.1016/j.pocean.2019.102219, 2020.
Callies, U., Groll, N., Horstmann, J., Kapitza, H., Klein, H., Maßmann, S., and Schwichtenberg, F.: Surface drifters in the German Bight: model validation considering windage and Stokes drift, Ocean Sci., 13, 799–827, https://doi.org/10.5194/os-13-799-2017, 2017.
Centurioni, L. R., Niiler, P. P., and Lee, D.-K.: Near-surface circulation in the South China Sea during the winter monsoon, Geophys. Res. Lett., 36, L06605, https://doi.org/10.1029/2008GL037076, 2009.
Copernicus Marine In Situ Tac Data Management Team: Copernicus Marine In Situ NetCDF format manual, https://doi.org/10.13155/59938, 2023.
Cucco, A., Sinerchia, M., Ribotti, A., Olita, A., Fazioli, L., Perilli, A., Sorgente, B., Borghini, M., Schroeder, K., and Sorgente, R.: A high-resolution real-time forecasting system for predicting the fate of oil spills in the Strait of Bonifacio (western Mediterranean Sea), Mar. Pollut. Bull., 64, 1186–1200, https://doi.org/10.1016/j.marpolbul.2012.03.019, 2012.
Davis, R. E.: Drifter observations of coastal surface currents during CODE: The method and descriptive view, J. Geophys. Res., 90, 4741–4755, https://doi.org/10.1029/JC090iC03p04741, 1985.
De Dominicis, M., Bruciaferri, D., Gerin, R., Pinardi, N., Poulain, P. M., Garreau, P., Zodiatis, G., Perivoliotis, L., Fazioli, L., Sorgente, R., and Manganiello, C.: A multi-model assessment of the impact of currents, waves and wind in modelling surface drifters and oil spill, Deep-Sea Res. II: Top. Stud. Oceanogr., 133, 21–38, https://doi.org/10.1016/j.dsr2.2016.04.002, 2016.
Gerin, R. and Bussani, A.: Nuova procedura di editing automatico dei dati drifter impiegata su oceano per MyOcean e prodotti web in near-real time e delay mode, REL. OGS 2011/55 OGA 20 SIRE, Trieste, Italy, 13 pp., https://argo.ogs.it/ppub/new_editing.pdf (last access: 5 October 2023), 2011.
Gerin, R., Bussani, A., Mancero Mosquera, I., Mauri, E., and Poulain, P.-M.: Lidex10 glider and drifter data, OGS [data set], https://doi.org/10.6092/ae3de06a-c9dd-4b5c-9250-3f03de017d66, 2020.
Goni, G. J., Todd, R. E., Jayne, S. R., Halliwell, G., Glenn, G., Dong, J., Curry, R., Domingues, R., Bringas, F., Centurioni, L., DiMarco, S. F., Miles, T., Morell, J., Pomales, L., Kim, H.-S., Robbins, P. E., Gawarkiewicz, G. G., Wilkin, J., Heiderich, J., Baltes, B., Cione, J .J., Seroka, G., Knee, K., and Sanabia, E. R.: Autonomous and Lagrangian ocean observations for Atlantic tropical cyclone studies and forecasts, Oceanogr., 30, 92–103, https://doi.org/10.5670/oceanog.2017.227, 2017.
Hansen, D. V. and Poulain, P.-M.: Quality control and interpolations of WOCE-TOGA drifter data, J. Atmos. Ocean. Technol., 13, 900–909, https://doi.org/10.1175/1520-0426(1996)013<0900:QCAIOW>2.0.CO;2, 1996.
Menna, M., Gerin, R., Bussani, A., and Poulain, P.-M.: The OGS Mediterranean Drifter Dataset: 1986–2016, Rel. OGS 2017/92 OCE 28 MAOS, Trieste, Italy, 34 pp., https://argo.ogs.it/pub/Menna et al 2017_Drifter_database.pdf (last access: 5 October 2023), 2017.
Menna, M., Gerin, R., Bussani, A., and Poulain, P.-M.: Surface currents and temperature data db_med24_nc_1986_2016_kri05 – db_med24_nc_1986_2016_kri6hF, OGS [data set], https://doi.org/10.6092/7a8499bc-c5ee-472c-b8b5-03523d1e73e9, 2018a.
Menna, M., Poulain, P.-M., Bussani, A., and Gerin, R.: Detecting the drogue presence of SVP drifters from wind slippage in the Mediterranean Sea, Measurement, 125, 447–453, https://doi.org/10.1016/j.measurement.2018.05.022, 2018b.
Menna, M., Bussani, A., Gerin, R., and Poulain, P.-M.: Surface currents and temperature data in the Black and Marmara seas, OGS [data set], https://doi.org/10.6092/b40cd642-9555-44fa-8b91-3cd88b6c225b, 2019.
Menna, M., Martellucci, R., Reale, M., Cossarini, G., Salon, S., Notarstefano, G., Mauri, E., Poulain, P.-M., Gallo, A., and Solidoro, C.: A case study of impacts of an extreme weather system on the Mediterranean Sea circulation features: Medicane Apollo (2021), Sci. Rep., 13, 3870, https://doi.org/10.1038/s41598-023-29942-w, 2023.
NASA: Panoply netCDF, HDF and GRIB Data Viewer, NASA [code], https://www.giss.nasa.gov/tools/panoply/, last access: 5 October 2023.
Pisano, A., De Dominicis, M., Biamino, W., Bignami, F., Gherardi, S., Colao, F., Coppini, G., Marullo, S., Sprovieri, M., Trivero, P., Zambianchi, E., and Santoleri, R.: An oceanographic survey for oil spill monitoring and model forecasting validation using remote sensing and in situ data in the Mediterranean Sea, Deep-Sea Res. II: Top. Stud. Oceanogr., 133, 132–145, https://doi.org/10.1016/j.dsr2.2016.02.013, 2016.
Poulain, P.-M. and Gerin, R.: Assessment of the water-following capabilities of CODE drifters based on direct relative flow measurements, J. Atmos. Ocean. Technol., 36, 621–633, https://doi.org/10.1175/JTECH-D-18-0097.1, 2019.
Poulain, P.-M., Ursella, L., and Brunetti, F.: Direct measurements of water-following characteristics of CODE surface drifters, Extended Abstracts, 2002 LAPCOD Meeting, Key Largo, FL, Office of Naval Research, https://lapcod.rsmas.miami.edu/2002-KeyLargo/abstracts/absC302.html (last access: 5 October 2023), 2002.
Poulain, P.-M., Gerin, R., Mauri, E., and Pennel, R.: Wind effects on drogued and undrogued drifters in the Eastern Mediterranean, J. Atmos. Ocean. Technol., 26, 1144–1156, https://doi.org/10.1175/2008JTECHO618.1, 2009.
Poulain, P.-M., Menna, M., and Mauri E.: Surface geostrophic circulation of the Mediterranean Sea derived from drifter and satellite altimeter data, J. Phys. Oceanogr., 42, 973–990, https://doi.org/10.1175/JPO-D-11-0159.1, 2012.
Poulain, P.-M., Bussani, A., Gerin, R., Jungwirth, R., Mauri, E., Menna, M., and Notarstefano, G.: Mediterranean surface currents measured with drifters: From basin to subinertial scales, Oceanography, 26, 38–47, https://doi.org/10.5670/oceanog.2013.03, 2013.
Quattrocchi, G., Simeone, S., Pes, A., Sorgente, R., Ribotti, A., and Cucco, A.: An operational numerical system for oil stranding risk assessment in a high-density vessel traffic area, Front. Mar. Sci., 8, 585396, https://doi.org/10.3389/fmars.2021.585396, 2021a.
Quattrocchi, G., Cucco, A., Cerritelli, G., Mencacci, R., Comparetto, G., Sammartano, D., Ribotti, A., and Luschi, P.: Testing a novel aggregated methodology to assess hydrodynamic impacts on a high-resolution marine turtle trajectory, Front. Mar. Sci., 8, 699580, https://doi.org/10.3389/fmars.2021.699580, 2021b.
Ralph, E. A. and Niiler, P. P.: Wind-driven currents in the tropical Pacific, J. Phys. Oceanogr., 29, 2121–2129, https://doi.org/10.1175/1520-0485(1999)029<2121:WDCITT>2.0.CO;2, 1999.
Ribotti, A., De Falco, G., and Arrichiello, V.: Experimentation of an innovative Lagrangian coastal drifter, in: Operational Oceanography, Implementation at the European and Regional Scales, Proceedings of the second international Conference on EuroGOOS, edited by: Fiemming, N. C., Vallerga, S., Pinardi, N., Behrens, H. W. A., Manzella, G., Prandle, D., and Stei, J. H., Elsevier Oceanography Series, Elsevier, 66, 335–340, https://doi.org/10.1016/S0422-9894(02)80039-3, 2002.
Ribotti, A., De Falco, G., and Arrichiello, V.: Experimentation of an innovative lagrangian coastal drifter, In: Operational Oceanography – Implementation at the European and Regional Scales, Proceedings of the second international Conference on EuroGOOS, edited by: Flemming, N. C., Vallerga, S., Pinardi, N., Behrens, H. W. A., Manzella, G., Prandle, D., and Stei, J. H., Rome-Italy, 11–13 March 1999, Elsev. Oceanogr. Serie., 66, 335–340, https://doi.org/10.1016/S0422-9894(02)80039-3, 2002.
Ribotti, A., Cucco, A., Olita, A., Sinerchia, M., Fazioli, L., Satta, A., Borghini, M., Schroeder, K., Perilli, A., Sorgente, B., and Sorgente, R.: An integrated operational system for the Coast Guard management of oil spill emergencies in the Strait of Bonifacio, in: Sustainable Operational Oceanography, Proceedings of the sixth International Conference on EuroGOOS, edited by: Dahlin, H., Flemming, N. C., Petersson, S. E., and Polska Akademia Nauk. Instytut Oceanologii, Sopot-Poland, 4–6 October 2011, EuroGOOS AISBL, 308–320, ISBN 9197482897 – 9789197482899, 2013.
Ribotti, A., Antognarelli, F., Cucco, A., Falcieri, M. F., Fazioli, L., Ferrarin, C., Olita, A., Oliva, G., Pes, A., Quattrocchi, G., Satta, A., Simeone, S., Tedesco, C., Umgiesser, G., and Sorgente, R.: An operational marine oil spill forecasting tool for the management of emergencies in the Italian seas, J. Mar. Sci. Engin., 7, 1, https://doi.org/10.3390/jmse7010001, 2019.
Ribotti, A., Bussani, A., Menna, M., Satta, A., Sorgente, R., Cucco, A., and Gerin, R.: A Mediterranean drifters' dataset, SEANOE [data set], https://doi.org/10.17882/90537, 2022.
Rio, M.-H. and Hernandez, F.: High frequency response of wind-driven currents measured by drifting buoys and altimetry over the world ocean, J. Geophys. Res., 108, 3283, https://doi.org/10.1029/2002JC001655, 2003.
Sala, I., Bolado-Penagos, M., Bartual, A., Bruno, M., García, C.M., López-Urrutia, A., González-García, C., and Echevarría, F.: A Lagrangian approach to the Atlantic Jet entering the Mediterranean Sea: Physical and biogeochemical characterization, J. Mar. Syst., 226, 103652, https://doi.org/10.1016/j.jmarsys.2021.103652, 2022.
Sorgente, R., Tedesco, C., Ribotti, A., Di Maio, A., Satta, A., Olita, A., Pessini, F., and Fazioli, L.: Caratterizzazione idrodinamica del Golfo di Cagliari mediante misure lagrangiane, Techn. Rep. IAMC-CNR Oristano, CNRSOLAR repository, code 6538TR2015 & ISEAN Reports ISBN10 88-7617-035-9, 10 pp., http://eprints.bice.rm.cnr.it/id/eprint/10565 (last access: 5 October 2023), 2015.
Sorgente, R., Tedesco, C., Pessini, F., De Dominicis, M., Gerin, R., Olita, A., Fazioli, L., Di Maio, A., and Ribotti, A.: Forecast of drifter trajectories using a Rapid Environmental Assessment based on CTD observations, Deep-Sea Res. II: Top. Stud. Oceanogr., 133, 39–53, https://doi.org/10.1016/j.dsr2.2016.06.020, 2016.
Sorgente, R., La Guardia, D., Ribotti, A., Arrigo, M., Signa, A., Pessini, F., Oliva, G., Pes, A., Perilli, A., and Di Maio, A.: An operational supporting system for oil spill emergencies addressed to the Italian Coast Guard, J. Mar. Sci. Engin., 8, 1035, https://doi.org/10.3390/jmse8121035, 2020.
Woods, J. D., Dahlin, H., Droppert, L., Glass, M., Vallerga S., and Flemming, N. C.: The Strategy for EuroGOOS, EuroGOOS Publication No. 1, Southampton Oceanography Centre, Southampton, ISBN 0-904175-22-7, 1996.